ҕ�X�y���������C���˻��������족

�������������I�аl�F��M�м��g���P
�ԙC�������������b������w������ҕ���X���܂��еęC���˻�������������u�ɞ���͏��s���������׃������ģʽ���A�пƼ���W���������������J�飬�S�����I�C�����c���Sҕ�X�y�����˹������㷨����һ����Ϣ���g������ںϣ��C���˻���������ϵ�y��ͻ������ԡ��������c�˙C�����������������ϵ�y�`���Ժ��˙C�������������ЏV���đ���ǰ������������������������������������������ش��������ҕ�X�y���c�C���˻���������W�gǰ�أ����@�߾������Sҕ�X�y�����g���C���˼ӹ����ȱ��ϼ��g���C���˙z�y/�ӹ������b�����ƣ��_չ�������о���ͬ�r���з����̌W������“�����ˡ��ƽ��ں�”�Ľ̌W�����ʸ־��������B�C���˻���������μℓ���˲š�
���Ŀ���ʮ���d��ͻ�Ə��s�����߾���ҕ�X�y�����ļ��g
“�����м�Ҫ�����ǿգ�ҲҪ�_̤���أ������x����ǰ�صČW�g����ȥ���ˡ�”��������ζ���L���f��15��ǰ��������������ʿ���I�����څ��c������Ȼ�ƌW�������c�Ŀ“���͏��s��������Ĕ��ֻ��OӋ-�ӹ�-�y��һ�w����Փ�c���g”�������J���X�쵽���Sҕ�X�y�����зǽ��|ʽ�����ٸ�Ч����λ�ھ��ļ��g���ݣ�������׃�Μy���c�C���˼ӹ����ȿ��Ʒ�����ЏV韵đ���ǰ����������׃�����������⡢�������������؇����Ƽs�����Sҕ�X�y�����g�đ��á�

���������������ƵęC���˜y��-�ӹ�һ�w�����������b��
������������I�F��о���������s�����Ķ�ҕ���Ƴ���ԭ������������S�����P�I�������_�˶���������Q�����S�y�cӋ�㾫�������ڜy�������c���淴��Ӱ푵ļ��g�y�}��ᘌ��y�cҎģ��ǧ�f/�|�������y�c�ӯB����˹/�ִ������ȬF�����Мy��ȱ�ݣ��F����˺����y�c����������c�ںϵĔ��Wģ�ͺ�Ӌ�㷽��������˷�����С��ԭ��������ƥ�䶨λ�¼��g�������ˇ��Hͨ���c-�c��ICP�����x�c�c-���棨TDM�����xƥ���ܳ�ʼλ������/���s��������Ӱ�������������y�}���_�l��iPoint3D�y�c̎���c݆���u�rܛ��ϵ�y��
�����о��ɹ��@�ߵȽ����ƌW�о�����ɹ������g�l����һ�Ȫ���������������һ����������ij��I�~Ƭ����y�c����̎���c����݆���z�y��������з�ʽ�μ��z�y�r�g�s��85%���ϣ�ͻ���ˇ���ͬz�y���g���ИI�Ŕ��c�̘I�����L�U��������4����܇�l�әC���w���w�ȴ��͏��s����ȫ݆�������c�P�I����������ȡ������˶��������܇�l�әC�Ĕ��ֽ�ģ�c�®aƷ�_�l�������P�I���g֮һ֧�Α�����I�B�m8�����x����500����
��ʇ����ش��������ƙC���˜y��/�ӹ����������b��
������ָ����“��ʇ����ش��������Q�ش��е��P�I�������y�}������һ���Ƽ������������Ƹ��c”������ε��Ї����l���к����I���к���h����I�{�ЌW�����cһ���������뽻�����l�F�ձ��������ģʽ�D�������������ۙz�y������߾���ҕ�X�z�y�����ֹ����������鷀���C���˲�������������Ƥ����β����늷��m��ȳߴ����׃�Ρ��y�ӹ�����Ό��F�C���˜y��-�ӹ�һ�w���c���ȿ����ѳɞ��Ƽs����ģʽ�D��������ƿ�i��
ᘌ�������Ƥ����늷��m��ȴ�ߴ���s������ҕ�ǜy�����w�`���۷e�Ŵ��}���������о��˶�ҕ�ǜy�������o��ӛ�cȫ�־��_ƴ���·������C���˜y��ϵ�y�����_��±0.015�����A���ȣ�+0.02mm��ƴ�Ӿ��ȣ�/m�������������׃�Ώ��s�����ĵ���܉�E����c���Sƫ����Ʒ���������ͬ�r�M�����ԡ������c�`�ɶ�Ҫ��ęC���˼ӹ��ˑB����Q�����xɢ�y�cֱ�����ɼӹ�·�����ڵĵ���·���c�c���Sʸ�����ӆ��}��ᘌ��C���˜y��-�ӹ�һ�w��ϵ�y����Ԫ��Դ�`����Ͻ���܉�E�����y�}��������SE��3��Ⱥ���g�p�C����ͬ���˶�����Ŀ�˺��������F�˼ӹ��C����ĩ�ˌ��r�]�h�����c܉�E���ȿ��ơ�
�����о���������2����3ƪ��������ϵ��Փ����ʽ�l���ڡ�IEEE�C���˅R������IEEE T. Robotics����4ƪ����Փ�ı����Cе���̌W�����ՌW��������挣�}�������ͬ�Й����W�߱˵��_·�ߠ��_˹���Pietro Valdastri�������u�r��“��Ȃ��y��������Խ�ľ��Ⱥ�Ч��”�����������I�F�ȡ���˶�헄��³ɹ��������˴�����Ƥ����β�ͺ�늷��m��ęC���˜y��ϵ�y���麽�Տ��s�����F���z�y����늙C�M�F���\�S�ṩ����Ҫ���gƽ�_�������˙C���˜y��-�ӹ�һ�w�������b�䣬�����ڽ�ǧ����Ƥ�C��������ӹ������F�˙C����ĥ���ں�늴��~Ƭ�������a�еđ��á�
���пƽ��ں����ˣ����B�C������������μℓ���˲�
����һ������̎���������ʼ�K�Գ��������@һ�����΄ա����Y�όW�g�lչǰ�أ��v�r3�꾎���ˡ��C���ˌW���̲ģ��@ȫ������̲Ī�һ�Ȫ��������������ڶ��������C���ˌW�Ⱥ��Ĺ��I�C���˔Uչ����ꑿպ��ڙC���ˣ������˾�ʸ���c�\��������ָ���e�\�ӌW��ģ���C����ҕ�X��λ������Փ��֪�R����ӳ�ˮ�ǰ�C���ˌW�g�lչ�ͼ��g����ǰ�أ������B�W�����g���������ṩ��Դ�^��ˮ��

����������C���˹��̷������F�����n
���������ֳГ���ʡ��У��Ժ�̸��Ŀ4헣�ȫ��̽���ԌW�����|���B����ĵęC�����n���wϵ�ĸ��c�̌Wģʽ�ĸ���c�l����ȫ����“�C���ˌW�̌W��ӑ��”�����c�Г��˽�����“�C���ˌW�n��̓�M�����”����������ԌW�������ġ�“�̎����n+�W���n��ӑՓ+�����W�n�W��+�F�������`”��Y�ϵĽ̌W��ģʽ��֧�����A�пƼ���W2021����“�C����”���ƽ̌W���������錧���������B�����@���鱤�W�ߡ��x�˫@���y����Cе��ʿՓ�ļ��������Y�\�@���l���F�ƌW���g����������@ʮ�������𱭴�W�����IӋ����ِ�𪄡�6���������@ʡ/У���㱾�Ʈ��I�OӋ���������I�Fꠅ��c����“�����¹��Ƶ��������섓���˲����B�wϵ����”�@���Ҽ��̌W�ɹ���һ�Ȫ���
����һ���Ƽ������ߣ�������ʼ�K�ԇ����ش������W�g�о����Ƹ��c���ڸ߾���ҕ�X�y�������ͻ���Գɹ����҇����ա���늡���܇���ИI���g���P�ͮa�I����������ͻ��ؕ�I���ڙC���˻��������췽���ͻ���Գɹ�֧�����҇���һ����C��ARJ21֧���͙C���A��һ̖�ȇ����ش̽��O������һ������̎�������������“�ƽ��ںϡ�������”�Ľ̌W����������ġ�ʸ־��������B�C���˻���������μℓ���˲š�������δ���Ľ̌W���������У����������^�m“�����ǿա��_̤���ء��̕�����”��������۵Ĺ�����λ�Ϟ�����ش̽��O�Ͱμℓ���˲����Bؕ�I�Լ���������
(؟�ξ���admin)

��һƪ��̽�L���������ܹ��S����������չ�F�Ƽ�����Ӳ�ˌ���
 �Ї����{��ϴ�� �P�����l
�Ї����{��ϴ�� �P�����l �����Ϻ��
^���l��������
�����Ϻ��
^���l�������� ̽�L���������ܹ��S������
̽�L���������ܹ��S������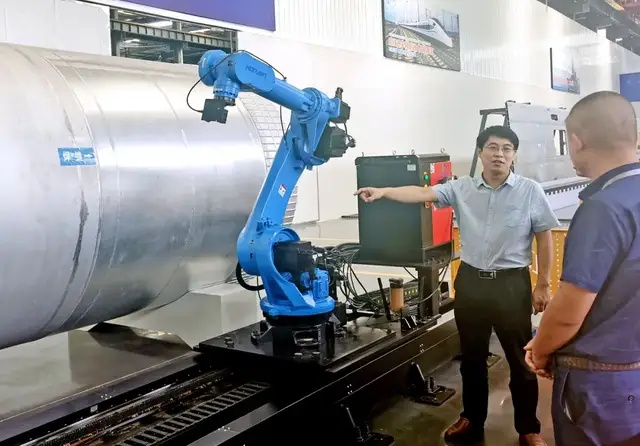 ҕ�X�y���������C���˻�
ҕ�X�y���������C���˻� �ЙC��Ҳ�Ќ��������𣬶�
�ЙC��Ҳ�Ќ��������𣬶� Փ�����h����I����������
Փ�����h����I����������- ���Ї����{��ϴ�� �P�����l�ģ��O�����
- �������Ϻ�� ^���l���������� ጷŸ��|
- ��̽�L���������ܹ��S����������չ�F�Ƽ�
- �� ҕ�X�y���������C���˻��������족
- ���ƺ���������ȡ��늙C���bʽ�p�Sֱ��ģ
- ���ЙC��Ҳ�Ќ��������𣬶����Ї�������
- ����5G+���I���W���x�������I������5
- ��Փ�����h����I���������˳����R �к�
- �������������조�����桱�����Ų�ӡ�l��
- ����棺�҇����������ИI�ʬF�����څ��
- ��̽�L���������ܹ��S����������չ�F�Ƽ�
- ����5G+���I���W���x�������I������5
- ���ƺ���������ȡ��늙C���bʽ�p�Sֱ��ģ
- ���������������ںτ������B
- ���Ї����{��ϴ�� �P�����l�ģ��O�����
- �����I�����I4.0�����b��������������̖
- ���ЙC��Ҳ�Ќ��������𣬶����Ї�������
- ��Փ�����h����I���������˳����R �к�
- �� ҕ�X�y���������C���˻��������족
- �� �P���� | �A�����C�����������}ETF


